
Le indagini sui luoghi di un incidente aereo stanno emergendo ultimamente come un’applicazione di grande interesse nel mondo dei droni. Puntualizziamo sin da subito che la raccolta di dati su eventi di questo genere viene spesso chiamata in causa per la produzione di materiale che viene successivamente utilizzato in via ufficiale nelle aule dei tribunali. Il lavoro di preparazione, acquisizione ed elaborazione dei dati richiede dunque una pianificazione molto attenta e scrupolosa delle missioni. In questo articolo di Sundance Media Group ci viene fornita un’analisi piuttosto accurata delle fasi di investigazione sul luogo dell’incidente di un elicottero ed una serie di considerazioni finali di grande utilità per chiunque svolga questa attività a qualsiasi livello.
I droni hanno già dimostrato più volte di poter essere uno strumento di grande efficacia nelle indagini di un incidente aereo vista la loro capacità, in concerto con i software fotogrammetrici, di ricostruire modelli tridimensionali molto accurati delle scene degli schianti. Utilizzando una Ground Sample Distance (GSD) molto elevata i modelli risultanti permettono analisi molto approfondite che consentono agli investigatori di notare particolari che potrebbero facilmente sfuggire ad una normale ricerca del sito via terra con mezzi canonici. I droni vengono spesso chiamati in causa per fornire assistenza in indagini in cui gli impatti al suolo dei velivoli ad alta velocità disseminano detriti in aree vaste e dove la natura accidentata delle aeree stesse non permette di effettuare ricerche accurate in totale sicurezza con mezzi tradizionali (fotografia, filmati, ispezioni a piedi o con mezzi fuoristrada).
In questo articolo esaminiamo il caso di un incidente ad un elicottero EuroCopter As350 che sembrava aver impattato un cavo di acciaio il quale, avvolgendosi su rotore e trave di coda, aveva spinto quest’ultima verso il muso del velivolo causando una rotazione ad alta velocità che aveva portato l’elicottero allo schianto.
I detriti si erano sparsi in un’area tutto sommato piuttosto contenuta per un incidente di questo tipo ma, data la natura molto difficile dell’area, diversi detriti, utili come prove per indagare sull’incidente, non erano stati rinvenuti.

Questo il resoconto degli investigatori della FFA: “L’elicottero si trovava sul versante destro di un terreno montagnoso densamente boscoso ad un’altitudine di 2.055 metri circa sul livello del mare. Un cavo di linea d’acciaio ha colpito le pale del rotore principale rimanendo impigliato in seguito anche nel rotore di coda. Quest’ultimo con una sola pala attaccata è stato rinvenuto a 6.4 metri dal relitto principale. Circa 9.1 metri del cavo di linea e una pala del rotore principale non sono stati rinvenuti. Lo stabilizzatore verticale è stato rinvenuto a 111.2 metri dalla carcassa principale.”
Vista la mancanza di due elementi (una pala di coda e parte del cavo di linea) e la difficoltà di accedere all’area, anche con auto a quattro ruote motrici, agli investigatori è stato richiesto di produrre, con l’aiuto di un team di esperti di rilievi fotogrammetrici con drone, una mappa tridimensionale ad alta risoluzione dell’area dello schianto allo scopo di localizzare le parti mancanti e valutare una loro possibile influenza sui motivi dello schianto.
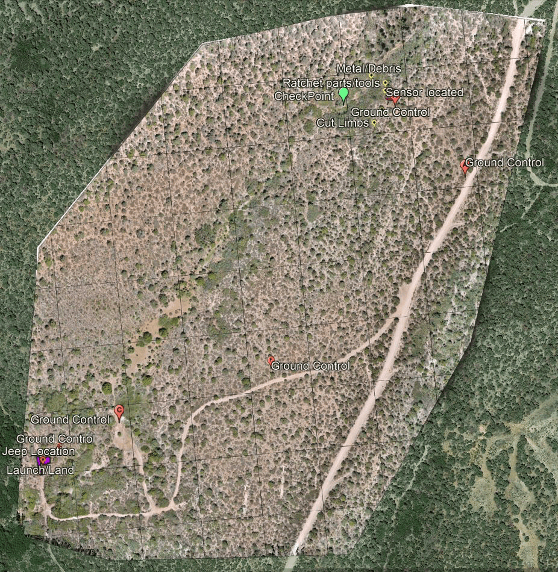
A causa della conformazione del terreno fatta di molti rilievi e avvallamenti viene deciso di utilizzare come area di decollo e atterraggio il punto più alto dell’intera area di ricerca identificata in uno spazio di 70 acri (circa 283.000 m2).
L’elicottero era parzialmente ricoperto da un vinile a scopo decorativo perlopiù di colore rosso, grigio e nero.

Il team si presenta sul sito con diverse mappe della zona, acquisite online da Google Earth, tramite le quali è stata precedentemente studiato il posizionamento più efficace possibile di sette Dischi Hoodman da piazzare nell’area come Ground Control Point (GCP) e da utilizzare sia per l’accuratezza del sistema RTK che come Manual Tie Points (MTP’s) una volta caricate le immagini nel software Pix4D
La pianificazione delle missioni di volo è stata precedentemente elaborata sulla base di una Ground Sample Distance (GSD) molto elevata pari a 0.4 cm/pixel ma a causa della natura montagnosa dell’aerea e dei cambi di elevazione si è notata fin da subito una discontinuità nella GSD dati rilevati. Viene quindi deciso di rilevare l’area con diverse GSD ad una media di 0.2 cm/pixel per aumentare il ventaglio di scelta dei possibili rilievi da utilizzare in fase di post-produzione allo scopo di ottenere la composizione finale migliore possibile.
Un GSD di questo tipo è palesemente esagerato rispetto al necessario nella stragrande maggioranza dei casi ma l’obiettivo finale di questo progetto è quello di poter distinguere senza ombra di dubbio gli elementi naturali del terreno, quali rocce o rami, da potenziali rottami di elicottero anche di dimensioni molto ridotte.

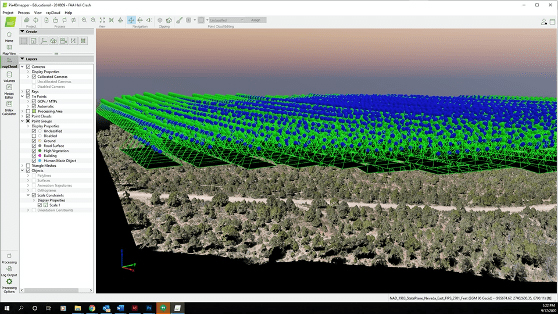
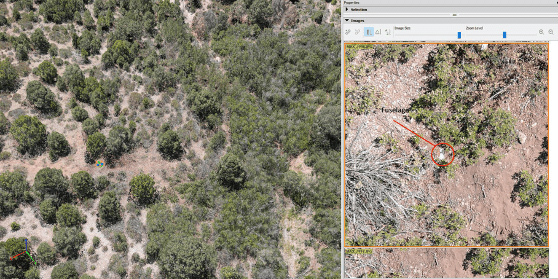
Operando in questo modo è stato possibile fornire agli investigatori un file GeoTiff da 3.5 GB da importare direttamente in Google Earth Pro, in modo da poter cominciare le ricerche per poi fare riferimento al progetto di Pix4DMapper una volta renderizzato e assemblato nella sua versione finale.
Visionare il risultato finale direttamente in Pix4D permette un’analisi nettamente più approfondita dell’incidente aereo tramite l’accesso a molti più strumenti di misurazione e visualizzazione, ma anche il solo file GeoTiff importato direttamente in Google Earth da modo di eseguire uno studio iniziale ad un livello di profondità più che sufficiente.
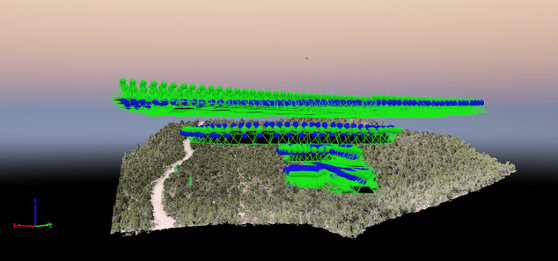
Le missioni di volo sono state eseguite con due Droni Autel EVO II Pro pianificandole precedentemente in modo che un primo drone si occupasse di catturare le immagini nei corridoi Nord e Sud ed il secondo nei corridoi Est e Ovest dimezzando in questo modo il tempo di acquisizione necessario. L’utilizzo di almeno due mezzi è una scelta obbligata quando si parla di spazi di queste dimensioni soprattutto quando viene richiesto, come in questo caso, un dettaglio molto elevato.
I voli sono stati programmati in una finestra temporale partendo dalle ore 11.00 del mattino fino alle 13.30 per cercare di ridurre al minimo i problemi di distorsione nelle immagini acquisite dovuti ad una cattiva gestione delle ombre proiettate da sole.
Per evitare qualsiasi rischio di collisione tra i due droni durante l’acquisizione è stato calcolato uno sfalsamento temporale, in modo da far iniziare la missione ai due velivoli ai lati opposti dell’area in due momenti differenti, ed uno sfalsamento spaziale impostando due altitudini di volo differenti di qualche metro.
Entrambe le missioni sono state programmate per voli ad una velocità inferiore alle 11 mph (poco meno di 18 Km/h) per avere la certezza di un risultato il più nitido possibile. Anche in questo caso la scelta è stata volutamente esagerata per evitare qualsiasi tipo di problema di sfocatura nelle foto acquisite, considerando il viaggio di oltre tre ore che separava gli uffici dal sito del rilievo.
Ogni drone ha consumato 5 batterie impostate per avere una prima notifica di esaurimento al 30%. Il tempo totale impiegato per l’acquisizione è stato di poco superiore ai 150 minuti per ogni drone, più un volo aggiuntivo di circa 45 minuti nelle vicinanze del luogo dell’impatto in modo da avere ancora più dettagli di quell’area in particolare.

Utilizzare il punto più alto dell’intera area interessata dall’incidente aereo come zona di lancio e di atterraggio ha evitato qualsiasi rischio di perdita di segnale, specialmente nelle vicinanze delle aree più montagnose o boscose, ed ha garantito inoltre il mantenimento della VLOS (Visual Line Of Sight) per tutta la durata dei voli. Allo stesso scopo per maggiore sicurezza su ogni drone sono stati installati due kit luminosi FOxFury D3060 in modalità stroboscopica (il kit di illuminazione è incluso nell’acquisto degli Autel Evo II Pro).
Dopo un breve volo di controllo eseguito per verificare soprattutto la correttezza dei parametri di esposizione delle camere e dopo tutti i check pre-volo si è potuto dare il via alla missione.
Le immagini dell’incidente aereo acquisite sono state in tutto quasi 7.000 e periodicamente, durante la missione, sono state scaricate a campione per controllarne la qualità e garantirne la coerenza. Il volo nelle immediate vicinanze del punto di impatto è stato svolto manualmente recandosi direttamente sul posto ed un altro volo manuale, sempre sul posto, è stato fatto per aumentare la qualità delle immagini catturate in un canalone nei pressi dell’area principale.
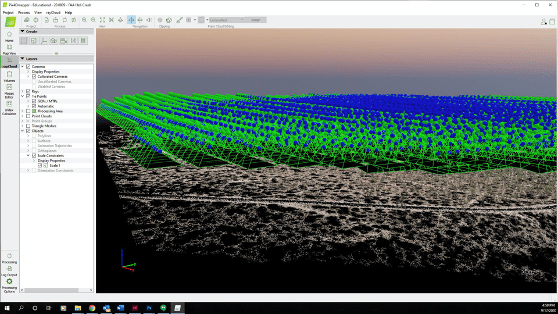
La prima nuvola di punti ha richiesto circa 12 ore di rendering con il software settato per ottenere il massimo della qualità dalle foto acquisite. Il risultato finale è stato a dir poco eccezionale: nonostante la vastità dell’area, la nuvola di punti ottenuta presentava una densità talmente alta che non si era resa nemmeno necessaria la generazione della mesh per migliorarne l’impatto visivo, anche se va ammesso che da un punto di vista puramente estetico il risultato finale ne avrebbe sicuramente giovato.
Il progetto ha generato più di 38 milioni di punti 2D e quasi 14 milioni di punti 3D da una combinazione di quasi 7.000 immagini.
Con questo risultato gli investigatori sono stati in grado di immergersi in profondità nell’area dell’incidente aereo e di effettuare una ricerca molto accurata che ha permesso di portare alla luce molti detriti anche di piccole dimensioni. Nonostante nessuno di questi frammenti sia stato infine rilevante per accertare le cause dell’incidente, questo sistema ha dato modo di controllare l’area ripetutamente ed in fasi successive di identificare nuove zone di particolare interesse, che sono state poi verificate con la dovuta calma in un secondo momento, e di trovare detriti che sarebbe stato molto difficile, se non impossibile, rinvenire con i metodi tradizionali.
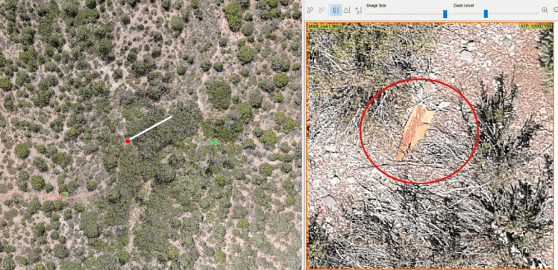
È stato possibile inoltre utilizzare strumenti di ricerca assistita allo scopo di portare in evidenza specifici parametri di colore, tenendo conto che la maggior parte della fusoliera era di colore rosso è stato possibile rinvenire parti dell’elicottero di dimensioni inferiore ai 3 centimetri.
È stato usato, tra gli altri strumenti, anche il DTResearch 301 tablet che, oltre a fornire le informazioni di posizionamento RTK, è stato utilizzato allo scopo di acquisire nuvole di punti in maniera locale direttamente tramite la sua fotocamera. Acquisire dati tramite scansioni locali da una prospettiva terrestre, specialmente in punti dove sono stati piazzati dei GCP, permette di ottenere risultati molto dettagliati in spazi di dimensioni ridotte. Questo può essere un metodo interessante da tenere in considerazione soprattutto nei rilievi dei cantieri edili o in scansioni di ambienti indoor assieme all’uso delle tecnologie di Optical Image Stabilization (OIS).

Considerazioni primarie
- GSD: La parte più critica dell’intero processo per la quale vanno tenuti in considerazione diversi fattori. La ricerca del giusto bilanciamento tra altitudine e problemi derivanti dal prop-wash delle eliche, con tutte le considerazioni del caso relative alla sicurezza.
Il mantenimento della coerenza del GSD sulle superfici verticali risulta essere fondamentale per la qualità e la precisione del modello finale. È consigliabile programmare voli specifici per la cattura dei punti su superfici di questo tipo.
La distorsione dovuta alle ombre è un altro aspetto importante. Se lo spazio da analizzare è molto esteso con il passare del tempo le ombre inevitabilmente si sposteranno nonostante la vostra velocità di esecuzione. In alcuni casi può essere difficile distinguerle da difetti che potrebbero eventualmente essere presenti nelle foto o dalla morfologia particolare del terreno in alcune zone. Sotto questo punto di vista l’esperienza nei settaggi, più che la strumentazione stessa, può aiutare a migliorare la fase di acquisizione - Esposizione: Controllare l’esposizione della camera prima di iniziare la missione è un’operazione a dir poco essenziale soprattutto se non avete a disposizione sul sito un’applicazione come Pix4Dreact per controllare rapidamente i dati non appena acquisiti. La posizione del sole nel momento in cui si effettuano le missioni di acquisizione è fondamentale per un buon risultato e le ore centrali del giorno sono sicuramente le più adatte per una corretta gestione delle zone d’ombra e di luce. Vanno quindi sfruttate, se possibile, nella maniera migliore. Controllare sempre l’esposizione posizionando il drone al di sopra della scena primaria e mantenendo gli ISO il più bassi possibile (50-100 è un ottimo parametro per le scene outdoor). Non utilizzare mai settaggi che rendono le foto troppo sature di colore o il formato LOG quando si acquisisce a scopo di mappatura.
- Overcapture: Non pensare mai di stare scattando troppe foto o di esagerare con l’overlap. Non è mai dannoso, i software di post produzione amano le grandi quantità di immagini.
- Immagini oblique e angolari: Acquisire sempre immagini oblique quando possibile e, indipendentemente dall’utilità che crediate possano avere, acquisire anche le immagini degli angoli e dei bordi dell’area. Quando possibile, combinare le immagini ottenute con altre acquisite direttamente da terra. È possibile ottenere questo tipo di immagini anche camminando, drone alla mano (rimuovendo le eliche per sicurezza), per tutto il perimetro dell’area.
Qui di seguito viene fornito un esempio di ciò che può succedere quando uno dei punti precedenti non viene adeguatamente preso in considerazione.
Queste foto rappresentano una scena che si è cercato inutilmente di riparare in post-produzione.
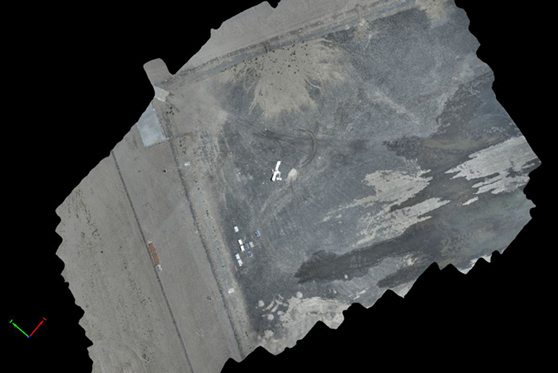
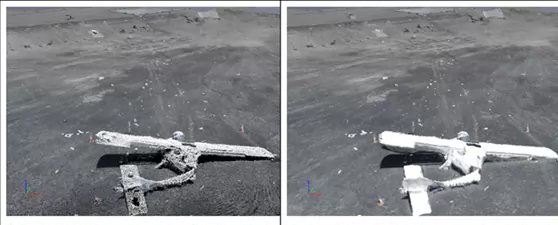
I problemi principali sono la sovraesposizione della camera, il GSD troppo basso dovuto ad un’altitudine di acquisizione troppo elevata e la totale mancanza di acquisizioni oblique. Il risultato è una scena impossibile da misurare in maniera appropriata, scarsa di dettagli e, vista la sovraesposizione, difficoltosa anche nel processo di unione delle diverse nuvole a disposizione. Errori di questo tipo non possono essere corretti in alcun modo nella fase di post-produzione. Fuoco, esposizione e GSD non possono essere rettificati a posteriori!
Va tenuto sempre a mente che lo scopo primario di una mappatura, sia essa per la scena di un incidente, per un rilievo assicurativo o per qualsiasi altra attività che la richieda, non è quello di ottenere un gemello perfetto della scena reale ma quello di fornire al cliente uno strumento per poter migliorare e accelerare il lavoro per il quale è stato richiesto. Le missioni, i voli, la post-produzione ed i formati di esportazione vanno pensati, preparati e realizzati con questo concetto sempre in cima alle priorità.
È un lavoro complesso, non alla portata di tutti i piloti di droni. Chi vuole entrare in questo mondo deve esercitarsi con gli strumenti di mappatura volando negli ambienti più difficili e complessi per essere pronto ad affrontare qualsiasi sfida gli venga proposta. Il freddo che scarica le batterie più rapidamente, le problematiche che si creano con i segnali satellitari, i malfunzionamenti dei dispositivi, la gestione di missioni lunghe con cambi di batterie multipli, il vento e gli agenti atmosferici sono tutti eventi che vanno studiati attentamente e a cui bisogna essere preparati.
Equipaggiamento utilizzato
- 2 Autel EVOII Pro Aircaft
- Autel Mission Planner Software
- 4 FoxFury D3060 light
- DT301T-TR rugged GNSS tablet
- Accessori Seco
- Accessori Manfrotto
- Hoodman GCP
- Hoodman paraluce
- Software Dot3D per Windows 10
- Pix4D mapper Software
- Luminar 4 Software
LEGGI ALTRI ARTICOLI
- Droni contro i Mega Incendi: un alleato nella lotta contro il fuoco
 I cambiamenti climatici hanno portato ad un aumento senza precedenti degli incendi boschivi su larga scala, mettendo a rischio interi ecosistemi, comunità e biodiversità in tutto il mondo.Tuttavia, nella lotta contro questi eventi catastrofici, i droni si stanno dimostrando strumenti potenti ed efficaci per il monitoraggio, la prevenzione ed il controllo.In sempre più occasioni, gli… Leggi tutto »Droni contro i Mega Incendi: un alleato nella lotta contro il fuoco
I cambiamenti climatici hanno portato ad un aumento senza precedenti degli incendi boschivi su larga scala, mettendo a rischio interi ecosistemi, comunità e biodiversità in tutto il mondo.Tuttavia, nella lotta contro questi eventi catastrofici, i droni si stanno dimostrando strumenti potenti ed efficaci per il monitoraggio, la prevenzione ed il controllo.In sempre più occasioni, gli… Leggi tutto »Droni contro i Mega Incendi: un alleato nella lotta contro il fuoco - Droni in cantiere: utilizzi e vantaggi
 In questi ultimi decenni, a livello globale, le attività economiche in molteplici settori hanno costantemente migliorato la propria produttività attraverso l’innovazione e l’adozione di nuove tecnologie. In controtendenza il settore edile, una delle più importanti realtà del panorama imprenditoriale, ha mantenuto in gran parte gli stessi vecchi processi analogici, facendo registrare una crescita annuale della… Leggi tutto »Droni in cantiere: utilizzi e vantaggi
In questi ultimi decenni, a livello globale, le attività economiche in molteplici settori hanno costantemente migliorato la propria produttività attraverso l’innovazione e l’adozione di nuove tecnologie. In controtendenza il settore edile, una delle più importanti realtà del panorama imprenditoriale, ha mantenuto in gran parte gli stessi vecchi processi analogici, facendo registrare una crescita annuale della… Leggi tutto »Droni in cantiere: utilizzi e vantaggi - Droni con Termocamera: funzionamento e utilizzi
 Le immagini termiche rilevate tramite l’utilizzo di droni con termocamera stanno guadagnando, anno dopo anno, sempre maggiore popolarità. Grazie al continuo miglioramento tecnico degli UAS sui quali viene montata la termocamera, seguito da una maggior durabilità delle batterie con il conseguente aumento dei tempi effettivi di volo e, fattore non meno importante, grazie alla qualità… Leggi tutto »Droni con Termocamera: funzionamento e utilizzi
Le immagini termiche rilevate tramite l’utilizzo di droni con termocamera stanno guadagnando, anno dopo anno, sempre maggiore popolarità. Grazie al continuo miglioramento tecnico degli UAS sui quali viene montata la termocamera, seguito da una maggior durabilità delle batterie con il conseguente aumento dei tempi effettivi di volo e, fattore non meno importante, grazie alla qualità… Leggi tutto »Droni con Termocamera: funzionamento e utilizzi - Drone Soccer: lo Sport che viene dal Futuro
 Il calcio con droni o meglio il Drone Soccer è lo sport aereo internazionale più recente riconosciuto dalla Féderátion Aéronautique Internationale, l’organizzazione che governa tutti i record aerei e gli sport d’aria a livello mondiale, e va ad aggiungersi all’unico altro sport competitivo praticato con i droni ovvero la corsa. A differenza delle gare di… Leggi tutto »Drone Soccer: lo Sport che viene dal Futuro
Il calcio con droni o meglio il Drone Soccer è lo sport aereo internazionale più recente riconosciuto dalla Féderátion Aéronautique Internationale, l’organizzazione che governa tutti i record aerei e gli sport d’aria a livello mondiale, e va ad aggiungersi all’unico altro sport competitivo praticato con i droni ovvero la corsa. A differenza delle gare di… Leggi tutto »Drone Soccer: lo Sport che viene dal Futuro - DRONI contro mine antiuomo: come agiscono?
 Chi mastica un po’ di storia dei droni sa che gli UAS sono stati creati e, dalla seconda guerra mondiale in avanti, sviluppati per scopi militari: nascono quindi come strumenti di distruzione. In contrapposizione, in questo ultimo decennio, stiamo assistendo ad un sempre maggior utilizzo di droni nel settore umanitario. Sempre più ONG hanno cominciato… Leggi tutto »DRONI contro mine antiuomo: come agiscono?
Chi mastica un po’ di storia dei droni sa che gli UAS sono stati creati e, dalla seconda guerra mondiale in avanti, sviluppati per scopi militari: nascono quindi come strumenti di distruzione. In contrapposizione, in questo ultimo decennio, stiamo assistendo ad un sempre maggior utilizzo di droni nel settore umanitario. Sempre più ONG hanno cominciato… Leggi tutto »DRONI contro mine antiuomo: come agiscono?